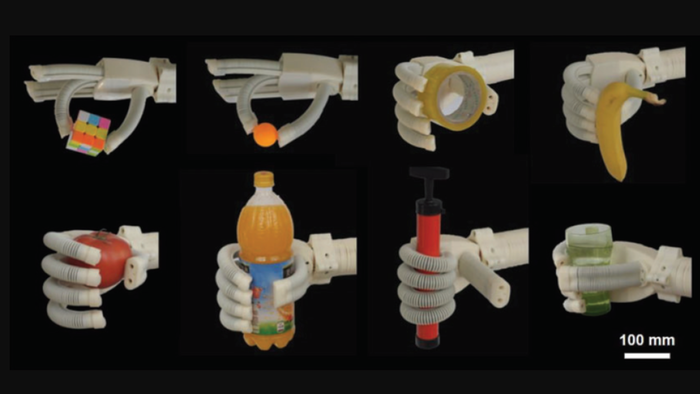
手指由靈活的混合式氣動執(zhí)行器構(gòu)成,可以獨立移動。
密歇根州東蘭辛-需要 個柔軟觸感的機器人嗎?密歇根州立大學(xué)的工程師團隊設(shè)計并開發(fā)了 種新穎的類人動物手,該手可能會有所幫助。
在工業(yè)環(huán)境中,機器人通常用于需要重復(fù)抓握和操縱物體的任務(wù)??梢园l(fā)現(xiàn)人手的機器人末端稱為末端執(zhí)行器或抓取器。
席作者曹長勇說:“新穎的類人動物手設(shè)計是 種軟硬混合的柔性抓手。與傳統(tǒng)的純軟手相比,它可以產(chǎn)生更大的抓地力,并且在精確操作方面比其他重物更穩(wěn)定。” ,密歇根州立大學(xué)軟機和電子實驗室主任,包裝,機械工程以及電氣和計算機工程助理教授。
這項新的研究“通過柔性混合式氣動執(zhí)行器具有較大抓力的軟人形機器人手 ”發(fā)表在“ 軟機器人”上。
通常,軟手抓取器(主要用于物體可能易碎,輕巧和不規(guī)則形狀的環(huán)境中)存在幾個缺點:鋒利的表面,抓握不平衡負載的穩(wěn)定性差以及用于處理重負載的抓握力相對較弱。
在設(shè)計新模型時,曹和他的團隊考慮了從水果采摘到敏感醫(yī)療等 系列人與環(huán)境的相互作用。他們發(fā)現(xiàn)某些過程需要與易碎物品進行安全但牢固的交互。現(xiàn)有的大多數(shù)夾持系統(tǒng)都不適合這些目的。
該團隊解釋說,設(shè)計的新穎性造就了 個原型,該原型展示了響應(yīng)靈敏,快速,輕巧的抓手的優(yōu)點,該抓手能夠處理傳統(tǒng)上需要不同類型抓手系統(tǒng)的許多任務(wù)。
人形柔軟手的每個手指均由柔性混合氣動執(zhí)行器(或FHPA)構(gòu)成,該氣動執(zhí)行器由壓縮空氣驅(qū)動彎曲,從而形成了模塊化的運動框架,使每個手指彼此獨立地運動。
曹說:“用于工業(yè)應(yīng)用的傳統(tǒng)剛性夾持器通常由簡單但可靠的剛性結(jié)構(gòu)制成,有助于產(chǎn)生較大的力,高精度和可重復(fù)性。” “擬議中的軟人形手在抓握復(fù)雜形狀和易碎物體時表現(xiàn)出出色的適應(yīng)性和兼容性,同時保持了很高的剛度,可施加強大的夾緊力來舉起重物。”
曹解釋說,從本質(zhì)上講,兩全其美。
FHPA由硬組分和軟組分組成,圍繞致動氣囊和骨狀彈簧芯的獨特結(jié)構(gòu)組合構(gòu)建。
曹說:“它們結(jié)合了軟爪的可變形性,適應(yīng)性和柔順性的優(yōu)點,同時保持了由致動器的剛性產(chǎn)生的大輸出力。”
他認為,該原型可用于水果采摘,自動包裝,醫(yī)療,康復(fù)和手術(shù)機器人等行業(yè)。
該團隊希望將其 進技術(shù)與曹 近在所謂的“智能”抓取器上的工作結(jié)合起來,以便將未來的研究和開發(fā)留有足夠的空間,將抓取材料中集成印刷傳感器。通過將混合抓手與“軟臂”模型相結(jié)合,研究人員旨在更精確地模擬精確的人類動作。